


2014-09-07

他の
垂直方向の高さを設定します。 ヘリコプター。
垂直方向の高さを設定します。 ヘリコプター。
クライムは重い垂直モードです。 これは、2つの要因によるものです。 最初は、ヘリコプターの重量よりもロータの推力も下向きその発泡ストリーム中に作成されたヘリコプターの機体の抵抗を克服しなければならないということです。
この送風方向胴体領域において、有害な抵抗が最も大きい作成。 機体のデザインの背面に全体のフロントを爆破するようになって上から下に悪い合理化にあります。 これらの考察から、ローターの最大の推力が与えられ、電力費で開発されたことが望ましいであろう。 しかし、角度A =で動作している垂直上昇用ネジとして、これは、発生しない - 90°は、ロータ回転面内にあるため、空気流の欠如の開発コストが設定され困難を決定する、第二の状況である能力を、与えられたとき、最も低い牽引を垂直方向の高さ。
これらの2つの状況は、垂直上昇中のエンジンの大きな負荷を決定します。
からリフトヘリコプターロータートルク反応を動作させるための垂直上昇で
それは、それが呼び出されるように、垂直短縮ダイヤルまたは、上昇速度が限り利用可能な推力が需要を超えるように増加させることができることは明らかです。 あなたは各グラフィックのニーズと利用可能な推力のための高さを構築する場合、グラフ上のこれらの曲線の交点は、それぞれ特定の1の高さの最高値を登るします。 少数の高さに最も高い上昇の値を使用すると、登山をプロットすることができます。
利用可能な推力は、エンジンのパワーに依存しており、後者は高度に応じて変化します。 このビューでは上昇の高さや大きさに変更しました。 2,5 M / S - あなたは高高度エンジンの存在下で地球を登る場合2,75の10m /秒で、1キロの高さで、それは3,0 M / Sと2キロの高度です。
登山の3キロメートルの高さでヘリコプターが静的天井に達したことを意味し、ゼロです。
、ヘリコプターのエンジン、高度にインストールすると、エンジンが増加する計算された高さまで登るとnevysotnomエンジンと推定高さの後に減少しています。
高高度のヘリコプターに搭載さ静的天井
Y軸周りのパイントS.を有する横力からテールローター推力及びモーメントの反力トルクロータモーメントであります
Z軸を中心縦ロータHの力と、最後に、トルクテールロータによって、力の軸受にモーメントをde11stvuyut。
これらの瞬間とトリムする方法の値を指定せずに、それは直線で同じ高さで、一定の速度で移動するように適切にコントロールに作用するパイロットは、常にピッチングやダイビングせずにせずに、ヘリコプターのバランスをとることができる唯一のことを言いますロールとヨー。
ヘリコプターが外力による飛行で安定している場合(例えば、一陣の風)は、1つの方向または別の拒否のヘリコプターが、パイロットの介入、元の位置にヘリコプターを復元します力とモーメントなし。
不安定なヘリコプターパイロットに飛んで常にコントロール(ノブコントロールヘリコプター、ペダル、「ステップ・ガス」)を拒否しなければならない場合には、バランスにヘリコプターを保持します。
それはヘリコプターの安定性を確保することは、設計者にとっての課題であることに留意すべきです。
空気より重いすべての航空機のための最も重要なパラメータは、最大レベルの飛行速度です。 だから、多くの場合、大規模な最高速度のヘリコプター飛行かどうかを尋ねましたか? そして、答えはノー以上200キロ/ hが、その後、失望に頭を振っていないことをすべきであるとき。 すでに本の冒頭で証明されたように、まだ、ヘリコプターの飛行の最大速度の問題は、評価のための主要な基準ではありません。
ヘリコプターが高速で飛ぶことができない理由を私たちが調べてみましょうか?
ヘリコプターの飛行速度は、いくつかの領域のロータブレードの故障の流れの出現の先頭に限定されています。
翼としてロータブレードのみ攻撃とスピードの角度のある範囲で低抵抗で高い揚力を開発するという事実。
例えば、唯一の迎角の値に攻撃が増加する角度の増加に伴って、プロファイルの揚力係数は、その後、リフトの急激な低下があります。
攻撃13°の角度は、プロファイルの攻撃の臨界角と呼ばれています。 空気の流れの中断を回避するために重要な上記迎角を増加させることが許されません。
一方、ロータの攻撃の角度の分布の画像は非常に多様です。
私たちは、ターンするためのメインローターブレードの終了時にプロファイルが4 12°までの迎角を変化させることがわかります。
異なる方位位置は、ロータブレードの端部で迎角の値を記録する場合は、次を得ます。
この表によると、私たちは、方位角の関数として半径rで攻撃ベーンスタッド軸受部の角度のグラフを構築します。
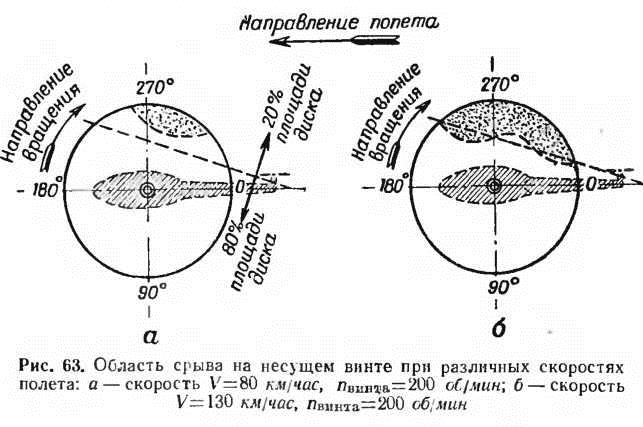
グラフは270程度の角度で、ロータの端部プロファイルの迎角が臨界角を接近°ことを示しています。 これは、それが(速度を誇張、回転数の不足)指定された飛行モードからマイナー偏差を可能にするのに十分であることを意味し、ディスクロータの全体の一部にはほとんどエレベーターが作成されないことがあるという事実につながる流れの失敗を開始しますが、それは動きに抵抗の増加となりますブレード。
ヘリコプターのローター振動の障害の出現により、その安定性と管理性を悪化させます。 ヘリコプターの飛行データの劣化の程度が破壊によって覆われた領域のサイズに依存します。 例えば、障害の小さい領域、20°/駆動ねじより上の障害はすでに、訂正困難な場合がありますしながら。
これは、攻撃12°、12 /分の臨界角のプロファイルを有するロータ径200 mへの破壊によってカバーされる値の範囲を示しています。 メインローターの障害の80キロ/ hの領域での飛行速度は約8%、まだ微々たるものであるとき。 失敗の130キロ/ hの領域の速度を上げる場合には、すでにほとんど20%スメタナ広場ネジを広がっています。 これは、緊急にローターのコレクティブピッチの減少だけでなく、対気速度とロータ速度が増加の減少に主に行われる可能性があり、攻撃の角度を、低減することが要求されます。
ブレードの端に破壊好都合を防止するためには、攻撃の高臨界角を持つプロファイルを持ちます。
バートスキンケアプロペラブレードとその飛行中のアイシングは劇的に破壊が始まる攻撃の臨界角を減らすことができます。
このように、後退翼で攻撃の臨界角は、高速で飛行ヘリコプターを制限する第1の要因は、流れの破壊であるとき。
それはすぐに流れの崩壊の結果は他の理由、すなわち高速崩壊で発生する可能性がありますように混乱に対処するための措置として、ロータの回転数の増加は、効果がないことを言及する必要があります。
ローターのプロファイルの失速速度は、運動プロファイルはMが臨界より大きいマッハ数で発生した場合の角度の動作範囲全体にわたって、攻撃の任意の角度で行うことができます。
世界の重要な数は、プロファイルの一部では、数Mを呼び出し、結果として、造波抵抗を超音速流の領域を表示されます。
空気中のスクリューのプロフィールの速度は、本質的に非圧縮性の媒体とみなすことができる音の速度(L1少数)、フロースムーズ合理化プロファイル、およびこれらの状態の空気よりもはるかに小さい場合、T。E.は、その密度と温度圧力変化を変更しません。
これは、空気の圧縮性のある状況にある場合には、圧縮率の特性を無視することができ、考慮されなければならないと思われます。
プロファイルの速度は、この場合、係数の空力プロファイルは飛行の速度に依存しない、攻撃の角度にのみ依存するので、空気の圧縮率は、完全に無視することができるに等しいか、または音30の%の速度よりも小さいです。
それも、流れの速度が実質的に対気速度が上昇すると比べて、エアフォイルの上面には、流れが滑らかなままであることがわかります。
すでに症状のn係数の空気の圧縮性を観察したが、わずかに0,3 0,7に対するMの数でも速度プロファイルの特性への影響、。
数Mは0,7について達すると、プロファイル(上面の通常最初の)は速度が超音速で、突然、突然、空気密度の圧力の増加を伴うされ、亜音速に入るエリアが表示されます。 このような場合には、私たちは「村」衝撃波のプロファイルと言います。
上位プロファイルの高速ジャンプのさらなる増加に伴い徐々に後縁に向かって移動します。 これと同時に、ジャンプがあると
また、後縁に向かって移動するエアフォイルの下面。

教育ジャンプは当然揚力の低下及び耐性プロファイルの増加につながる流れのかなりの混乱を伴います。
その上に流速の教育破壊は境界層と衝撃波のプロフィールに表示されます。 衝撃波は、表面境界層まで到達します。 ここでは、音の速度よりも低い境界層の速度のように、分散されていない、および形成条件は、ジャンプ超音速の存在です。
ジャンプ速度が減少し、圧力が上昇するので、空気粒子の境界層流中に矢印の方向に行われます。 蓄積、それのような空気の粒子が破壊に至る、境界流の壁を突破。
空気の圧縮性の発現の結果として現れた耐性プロファイルは、インピーダンスと呼ばれます。 回転子の電力損失の大部分は、波Poternaに落ちる - インピーダンス。
スムーズな流れプロファイルで13-14回抵抗の故障で耐性プロファイル。 リフト変化と圧力中心の位置を変更すると、プロファイルを生成した瞬間の変化を引き起こします。 ピッチアップするためにヘリコプターの安定性と制御性にどの劇的にマイナスの影響、 - 他の人がいる間いくつかのセクションでは、鼻ダウンする傾向があります。
数Mより大きい、総速度流れプロファイル大きい、と波の損失、したがって大きいです。 これは、明確に示さスクリュープロペラ羽根に沿って分布する電力損失の図からわかります。

波損失の割合が大きく、翼プロファイルの最後に近いです。
したがって、前進翼で臨界速度における流れの崩壊は、高速で飛行ヘリコプターを制限する第二の要因です。
したがって、それぞれのヘリコプターが飛行速度制限と風洞と飛行試験によって決定されているネジ(エンジン)の巻き数があります。
飛行能力の必要性が利用可能な容量になったときに水平飛行のヘリコプターの最高速度に達しました。
ヘリコプターはエンジンを往復搭載した場合、増加飛行速度との空き容量が増加し、ほぼ一定のままされていません。
抵抗はヘリコプター(胴体及びその他の部品)に変化するが、飛行速度の増加に伴って必要とされる電力が変化します。
電力需要は、インダクタンス、抵抗プロファイルと有害の克服に費やされています。
飛行の上昇速度と同じロッドの生成が少ない電力を必要とする最初の、速度の増加に伴って、必要とされる電力が減少します。 電力需要は、飛行速度に比例して減少します。 比例速度の二乗に高速抵抗増加のさらなる増加を有します。
必要な電力が利用可能な容量になる速度は、水平飛行の最大速度です。 速度のさらなる増加は、ヘリコプターを減少させることによって可能です。
最新ニュース:






.
.
ニュース
25.04.2024
24.04.2024
24.04.2024
24.04.2024
24.04.2024
24.04.2024
24.04.2024
24.04.2024
24.04.2024
24.04.2024






